

Mots-clé
Système embarqué durci, CortexM4, Capteur, Actionneur, Codeur, Résolveur, PVG32, Bus CAN
Millésime
2012-2013
Entreprise
R2S Robotics
Equipe projet
CONTI Rafaël
HERVAGAULT Yoann
LEOPOLD Jean
HERVAGAULT Yoann
LEOPOLD Jean
Présentation de l'entreprise
 R2S ROBOTICS est une toute jeune entreprise fondée en septembre 2012 avec la volonté de se positionner dans le domaine minier. Grâce à son expérience acquise et ses connaissances dans ce domaine, le fondateur a saisi l'opportunité de profiter du potentiel de ce secteur.
R2S ROBOTICS est une toute jeune entreprise fondée en septembre 2012 avec la volonté de se positionner dans le domaine minier. Grâce à son expérience acquise et ses connaissances dans ce domaine, le fondateur a saisi l'opportunité de profiter du potentiel de ce secteur.La société propose à ce jour des solutions d'assistance à la conduite et de reporting destinées à être intégrées sur les machines de forage en mine souterraine.
Des solutions plus automatisées sont à l'étude pour anticiper la mutation technologique du secteur visé.
Cette automatisation permettra à terme de commander la machine de forage sans l'intervention d'un opérateur sur la zone de travail.
Contexte du projet
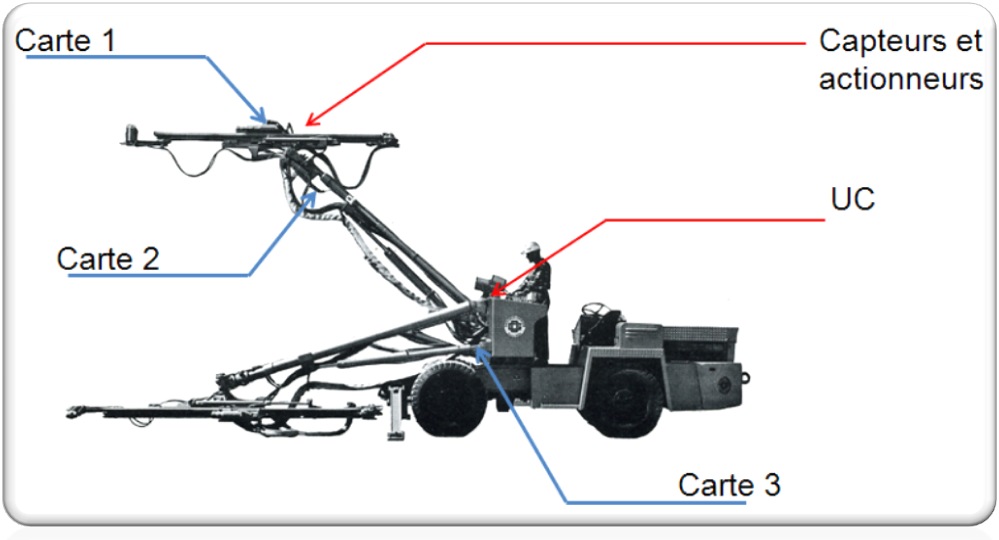
R2S ROBOTICS propose un système permettant de commander un bras de manière manuelle ou automatique basé sur des cartes électroniques vieillissantes ou achetées sur le marché avec des caractéristiques ne satisfaisant pas totalement le niveau de qualité visé. La conception d'une nouvelle gamme de cartes électroniques est décidée pour se doter de composants répondants aux exigences du marché visé. Dans cette gamme figurent les cartes d'acquisition sur bus CAN, objets du projet.
Objectifs
Développer de nouvelles cartes d'acquisition destinées à mesurer les valeurs des capteurs de mesures angulaires et linéaires installés sur un bras de forage.
Ce système se doit d'être :
Ce système se doit d'être :
- Durci pour une application embarquée en mine
- Distribué
- Moins couteux que le précédent
- Le plus générique possible pour accepter un maximum de types de capteurs.
- Compatible CAN
Déroulement du projet
Dans un premier temps, nous avons effectué différentes veilles technologiques pour étudier des solutions de conception qui répondaient aux besoins du client. Une grosse partie de début de projet a été de travailler le besoin de R2S ROBOTICS afin de l'affiner, et d'obtenir un cahier des charges qui réponde au mieux aux besoins de l'entreprise.
La seconde étape a été la conception du système de mesure. Pour cela nous avons conçu la partie électronique de manière théorique, puis nous avons vérifié son fonctionnement en utilisant des simulateurs. Pour finir, un prototype ainsi que des programmes de test sur cible embarquée ont été réalisés dans l'école, pour valider le fonctionnement pratique.
La troisième étape fut la fabrication du système de mesure par sous-traitance extérieure. En parallèle de cette tâche, les programmes de tests ont été modifiés et complétés afin d'effectuer des tests plus poussés sur le produit final.
La seconde étape a été la conception du système de mesure. Pour cela nous avons conçu la partie électronique de manière théorique, puis nous avons vérifié son fonctionnement en utilisant des simulateurs. Pour finir, un prototype ainsi que des programmes de test sur cible embarquée ont été réalisés dans l'école, pour valider le fonctionnement pratique.
La troisième étape fut la fabrication du système de mesure par sous-traitance extérieure. En parallèle de cette tâche, les programmes de tests ont été modifiés et complétés afin d'effectuer des tests plus poussés sur le produit final.
Résultats obtenus
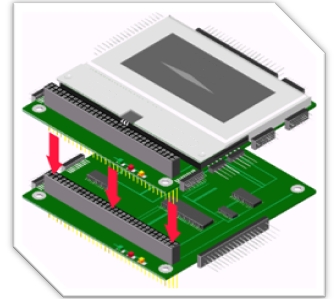 Nous avons conçu un système d'acquisition et de commande sous forme de carte de base et de carte module. La carte module vient se connecter sur la carte de base.
Nous avons conçu un système d'acquisition et de commande sous forme de carte de base et de carte module. La carte module vient se connecter sur la carte de base.Cette architecture permet de mutualiser la partie microcontrôleur et CAN sur la carte de base commune à toutes les configurations et d'apporter des fonctions spécifiques avec le type de module.
 Le système est configurable à la fabrication (choix du type d'entrée ou de sortie) par un système de point de soudure sur les cartes électroniques.
Le système est configurable à la fabrication (choix du type d'entrée ou de sortie) par un système de point de soudure sur les cartes électroniques.Pour finir, le système de mesure s'intègre parfaitement sur la machine de par sa taille, sa proximité par rapport au capteur et son interface de communication de type CAN.
Pour plus d'information, projet.industriel@esisar.grenoble-inp.fr
 retour
retourContact
Karim CHIBANE
Directeur transfert de technologies
Tel : +33 4 75 75 94 69
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47
Directeur transfert de technologies
Tel : +33 4 75 75 94 69
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47