Informations générales
Number of hours
- Lectures 12.0
- Projects -
- Tutorials 6.0
- Internship -
- Laboratory works 9.0
- Written tests -
ECTSECTS
2.5
Goal(s)
This course covers the fundamentals of control design and analysis using state-space methods. This includes both the practical and theoretical aspects of the topic. By the end of the course, the student should be able to design controllers using state-space methods and evaluate whether these controllers are robust.
Responsible(s)
Damien KOENIG
Content(s)
The full state feedback is a method employed in feedback control system theory to place the closed-loop poles of a plant in pre-determined locations in the s-plane. Placing poles is desirable because the location of the poles corresponds directly to the eigenvalues of the system, which control the characteristics of the response of the system. The course is decomposed as follow :
- Non linear Modelisation with the Euler Lagrange equation
- State space representation
- Study of the controllabilty and observability
- Stability analysis
- Disturbance attenuation
- Regulator/Observer design
- Proportional observer and Unknown input observer
- Study of the transfers functions S, T, loop
Linear algebra (rank of matrices, eigenvalues, kernel…).
Control of the systems debribed by a transfer function
Test
E1 = examen terminal session 1, calculatrices autorisées + 1 feuille A4 R/V manuscrite, durée 1h30.
E2 = examen session 2, calculatrices autorisées + 1 feuille A4 R/V manuscrite, durée 1h30.
Calendar
The course exists in the following branches:
- Curriculum - Network and computer science - Semester 6
- Curriculum - EIS - Semester 6
Additional Information
Course ID : 3AMAC324
Course language(s): 
The course is attached to the following structures:
You can find this course among all other courses.
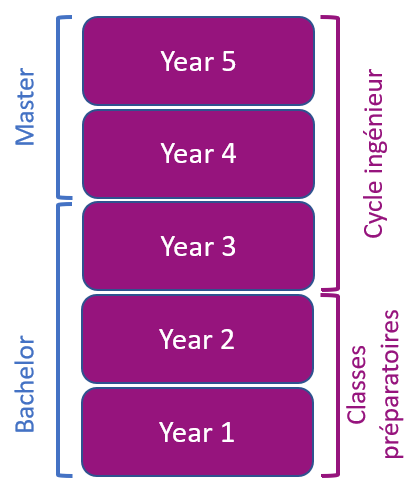
What is a grande école ?

French engineering curriculum