
Mots-clé
Test non intrusif, pompe à perfusion, pousse seringue, interface Homme-Machine, micro-vérins pneumatiques, détection de pixels, caméra, banc de test.
Millésime
2012-2013
Entreprise
FRESENIUS Vial
Equipe projet
KUCZEROWSKI Nicolas
DEVANNE LANGLAIS Pablo
GRIMAUD Simon
DEVANNE LANGLAIS Pablo
GRIMAUD Simon
Présentation de l'entreprise
Fresenius Kabi est un leader mondial dans le développement et la fabrication dans les systèmes de perfusion et de nutrition. Fresenius Vial est une filiale de Fresenius Kabi basée à Brézins (38) employant environ 500 personnes en charge de la conception et de la fabrication de systèmes de perfusion et de nutrition.
Contexte du projet
 Cette société a récemment développé la gamme de produits AGILIA qui comporte notamment un pousse-seringue et une pompe à perfusion. La société Fresenius Vial souhaite disposer d'un banc de test capable de vérifier le fonctionnement de l'interface utilisateur des produits de la gamme AGILIA. Ce banc de test devra exécuter de façon automatique une succession d'actions qui sont actuellement réalisées par un opérateur. Le banc de test n'est pas chargé de déterminer si le test est positif ou négatif, pour cela, le logiciel Squish est utilisé. Ce dernier est en charge du contrôle de l'interface homme machine développée au cours du projet et de l'analyse des données affichées dans celle-ci.
Cette société a récemment développé la gamme de produits AGILIA qui comporte notamment un pousse-seringue et une pompe à perfusion. La société Fresenius Vial souhaite disposer d'un banc de test capable de vérifier le fonctionnement de l'interface utilisateur des produits de la gamme AGILIA. Ce banc de test devra exécuter de façon automatique une succession d'actions qui sont actuellement réalisées par un opérateur. Le banc de test n'est pas chargé de déterminer si le test est positif ou négatif, pour cela, le logiciel Squish est utilisé. Ce dernier est en charge du contrôle de l'interface homme machine développée au cours du projet et de l'analyse des données affichées dans celle-ci.Objectifs
Les produits de la gamme AGILIA ont une face avant similaire composée d'un écran LCD, d'une série boutons poussoir ainsi que d'un bargraph. Le but du projet est de réaliser une interface homme machine permettant de contrôler une structure électromécanique. Cette structure permettra d'appuyer sur les boutons du plastron. De façon à effectuer le contrôle du produit sous test, l'état des pixels de l'écran LCD du produit doit être détecté et affiché dans l'I.H.M. L'objectif est d'atteindre une détection de l'état des pixels visibles fiable à 100%. La gamme AGILIA comporte plusieurs types de produits, le banc de test doit donc être compatible avec ces différents appareils. Il doit être possible d'appuyer plusieurs boutons du produit de façon simultanée avec une fréquence allant jusqu'à 5 Hz.
Déroulement du projet
La première étape du projet était la reformulation des besoins exprimés par la société Fresenius Vial afin de mener à la rédaction du cahier des charges fonctionnel.
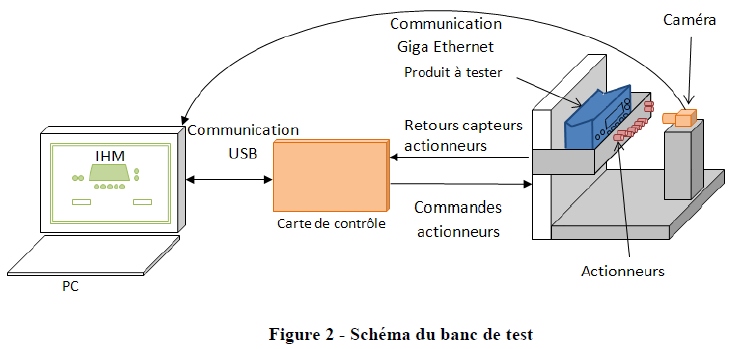
Une fois le besoin du client clairement identifié, une phase de recherche de technologies a été nécessaire afin d'envisager les différentes possibilités s'offrant à nous. Ces recherches ont été portées sur les technologies suivantes : actionneurs (quel type d'actionneurs est capable de générer des appuis sur les boutons du produits à une fréquence de 5 Hz) ; systèmes de vision (quel capteur permet la détection de l'état des pixels de l'écran LCD) ; logicielles (quels sont les framework utilisables pour la réalisation de l'interface Homme-Machine et permettant le traitement des informations provenant du système de vision). Les actionneurs retenus sont des micro-vérins pneumatiques du fait de leur faible encombrement et des performances temporelles du réseau pneumatique associé. Il a été nécessaire de concevoir une carte électronique afin de commander les distributeurs pilotant les actionneurs. Le système de vision retenu est la caméra industrielle, les images acquises sont par la suite traitées à l'aide de la bibliothèque OpenCV. Pour le développement de l'IHM, le framework Qt a été choisi.
Afin de valider les schématiques électroniques, un prototype de la carte de contrôle a été réalisé en interne ; la fabrication de la carte finale a été sous-traitée. En parallèle de ce travail, les développements logiciels et la gestion du sous-traitant en charge de la conception et de la fabrication de la structure mécanique ont été effectués. Une fois ces tâches effectuées, les sous-ensembles ont été testés séparément.
La dernière étape du projet était l'intégration des sous-ensembles, après réception de la structure mécanique et de la totalité des commandes, le banc de test a été assemblé et testé dans sa globalité.
Une fois le besoin du client clairement identifié, une phase de recherche de technologies a été nécessaire afin d'envisager les différentes possibilités s'offrant à nous. Ces recherches ont été portées sur les technologies suivantes : actionneurs (quel type d'actionneurs est capable de générer des appuis sur les boutons du produits à une fréquence de 5 Hz) ; systèmes de vision (quel capteur permet la détection de l'état des pixels de l'écran LCD) ; logicielles (quels sont les framework utilisables pour la réalisation de l'interface Homme-Machine et permettant le traitement des informations provenant du système de vision). Les actionneurs retenus sont des micro-vérins pneumatiques du fait de leur faible encombrement et des performances temporelles du réseau pneumatique associé. Il a été nécessaire de concevoir une carte électronique afin de commander les distributeurs pilotant les actionneurs. Le système de vision retenu est la caméra industrielle, les images acquises sont par la suite traitées à l'aide de la bibliothèque OpenCV. Pour le développement de l'IHM, le framework Qt a été choisi.
Afin de valider les schématiques électroniques, un prototype de la carte de contrôle a été réalisé en interne ; la fabrication de la carte finale a été sous-traitée. En parallèle de ce travail, les développements logiciels et la gestion du sous-traitant en charge de la conception et de la fabrication de la structure mécanique ont été effectués. Une fois ces tâches effectuées, les sous-ensembles ont été testés séparément.
La dernière étape du projet était l'intégration des sous-ensembles, après réception de la structure mécanique et de la totalité des commandes, le banc de test a été assemblé et testé dans sa globalité.
Résultats obtenus
 Le banc de test est capable de réaliser les actions nécessaires au test des différents produits de la gamme AGILIA : un clic sur un bouton présent dans l'interface Homme Machine engendre un appui sur le même bouton sur le clavier du produit et l'état des pixels de l'écran LCD est affiché à l'utilisateur.
Le banc de test est capable de réaliser les actions nécessaires au test des différents produits de la gamme AGILIA : un clic sur un bouton présent dans l'interface Homme Machine engendre un appui sur le même bouton sur le clavier du produit et l'état des pixels de l'écran LCD est affiché à l'utilisateur.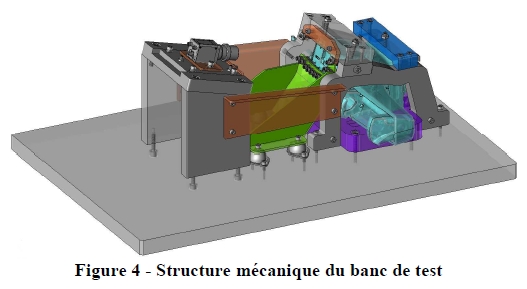 Le banc de test est capable d'effectuer les actions réalisées à l'heure actuelle par un opérateur en apportant une fiabilité qu'il n'est pas possible d'atteindre avec des tests manuels et permet l'automatisation des tests sur les versions logicielles implantées dans les systèmes de perfusion. La durée des tests est aussi diminuée de façon importante dans la mesure où le banc de test est autonome.
Le banc de test est capable d'effectuer les actions réalisées à l'heure actuelle par un opérateur en apportant une fiabilité qu'il n'est pas possible d'atteindre avec des tests manuels et permet l'automatisation des tests sur les versions logicielles implantées dans les systèmes de perfusion. La durée des tests est aussi diminuée de façon importante dans la mesure où le banc de test est autonome.
Pour plus d'information, projet.industriel@esisar.grenoble-inp.fr
 retour
retourContact
Gabriel Blanchard
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47