
Mots-clé
Jumbo Drill, Xenomai, temps-réel, Bus CAN, système embarqué
Millésime
2011-2012
Entreprise
ROBODRILL
Equipe projet
AUBERT Morgan
DE JESUS Christopher
SLOMIANNY Paul
DE JESUS Christopher
SLOMIANNY Paul
Présentation de l'entreprise
 Issue de l'activité de la société Montabert, Robodrill est une entreprise concevant et mettant à disposition de ses clients divers ensembles de forage. Celle-ci est focalisée sur le marché de l'excavation de tunnels et intervient dans de nombreux pays en fournissant le matériel et les équipes opérationnelles adaptées au besoin du client. A ce jour, la flotte de Robodrill est constituée de 80 machines environ, dont la moitié est robotisée.
Issue de l'activité de la société Montabert, Robodrill est une entreprise concevant et mettant à disposition de ses clients divers ensembles de forage. Celle-ci est focalisée sur le marché de l'excavation de tunnels et intervient dans de nombreux pays en fournissant le matériel et les équipes opérationnelles adaptées au besoin du client. A ce jour, la flotte de Robodrill est constituée de 80 machines environ, dont la moitié est robotisée.Robodrill possède ainsi un département Robotique ayant pour mission le développement des systèmes robotiques utilisés sur les machines de forage. Ce département possède une expérience dans ce domaine de plus de 25 ans.
Contexte du projet
Le présent projet s'inscrit dans une phase d'évolution stratégique de la société Robodrill. En effet, celle-ci désire proposer ses produits en OEM (Original Equipment Manufacturer), c'est-à-dire par l'intermédiaire d'un vendeur tiers. De plus, la société souhaite dans un second temps être présente sur le marché de la mine. Les produits fournis dans cette optique doivent ainsi bénéficier d'une facilité d'utilisation et de dépannage et doivent s'accorder avec l'automatisation complète de la mine.
Dans ce cadre, Robodrill souhaite produire une trentaine de machines par an pour le marché de la mine et ainsi doubler son chiffre d'affaire global en 7 ans (40 M €). Ces objectifs impliquent une montée en puissance du département Robotique de la société et l'évolution du système de commande des équipements afin d'en simplifier l'utilisation (paramétrage dynamique) et d'en augmenter la pérennité (environnement Linux Xenomai, carte CAN standard, etc).
Dans ce cadre, Robodrill souhaite produire une trentaine de machines par an pour le marché de la mine et ainsi doubler son chiffre d'affaire global en 7 ans (40 M €). Ces objectifs impliquent une montée en puissance du département Robotique de la société et l'évolution du système de commande des équipements afin d'en simplifier l'utilisation (paramétrage dynamique) et d'en augmenter la pérennité (environnement Linux Xenomai, carte CAN standard, etc).
Objectifs
Dans l'optique d'assurer la pérennité de la solution proposée par Robodrill, ce projet a pour objectif l'évolution du système de contrôle des Robofores afin d'en simplifier le paramétrage et de le rendre générique pour l'ensemble du matériel utilisé. De nouvelles solutions matérielles concernant les communications sur le bus CAN doivent également être apportées afin de rendre le système évolutif.
Déroulement du projet
La première étape du projet fut de prendre en main le code existant sur la carte PC embarquant l'intelligence de l'engin de forage ainsi que de se familiariser avec le domaine de l'excavation de tunnel et la mécanique utilisée. Ceci nous a permis de comprendre précisément le besoin de la société Robodrill en termes de flexibilité de l'application de commande de leurs robots et du hardware utilisé. Cette étape s'est achevée par une visite d'un chantier en activité où toute l'équipe a pu assister à un cycle de forage puis de tir à l'explosif.
 La deuxième étape, effectuée en parallèle de la première, fut de porter l'application de l'ancienne carte PC devenue obsolète vers la nouvelle, de paramétrer dynamiquement cette application de commande et d'effectuer les achats du nouveau matériel pour la communication entre la carte PC et les actionneurs. Ceci a demandé une étude approfondie du protocole de communication et de multiples échanges avec la société Robodrill afin de s'accorder quant au paramétrage et au choix des cartes d'interface.
La deuxième étape, effectuée en parallèle de la première, fut de porter l'application de l'ancienne carte PC devenue obsolète vers la nouvelle, de paramétrer dynamiquement cette application de commande et d'effectuer les achats du nouveau matériel pour la communication entre la carte PC et les actionneurs. Ceci a demandé une étude approfondie du protocole de communication et de multiples échanges avec la société Robodrill afin de s'accorder quant au paramétrage et au choix des cartes d'interface.
Il s'est ensuivi la réalisation d'un simulateur des capteurs des actionneurs destiné à communiquer avec la carte PC embarquant l'intelligence du robot, ceci afin de valider la communication de l'application, paramétrée dynamiquement, sur le réseau de capteurs intégrant la carte d'interface achetée par les étudiants.
La deuxième étape, effectuée en parallèle de la première, fut de porter l'application de l'ancienne carte PC devenue obsolète vers la nouvelle, de paramétrer dynamiquement cette application de commande et d'effectuer les achats du nouveau matériel pour la communication entre la carte PC et les actionneurs. Ceci a demandé une étude approfondie du protocole de communication et de multiples échanges avec la société Robodrill afin de s'accorder quant au paramétrage et au choix des cartes d'interface.Il s'est ensuivi la réalisation d'un simulateur des capteurs des actionneurs destiné à communiquer avec la carte PC embarquant l'intelligence du robot, ceci afin de valider la communication de l'application, paramétrée dynamiquement, sur le réseau de capteurs intégrant la carte d'interface achetée par les étudiants.
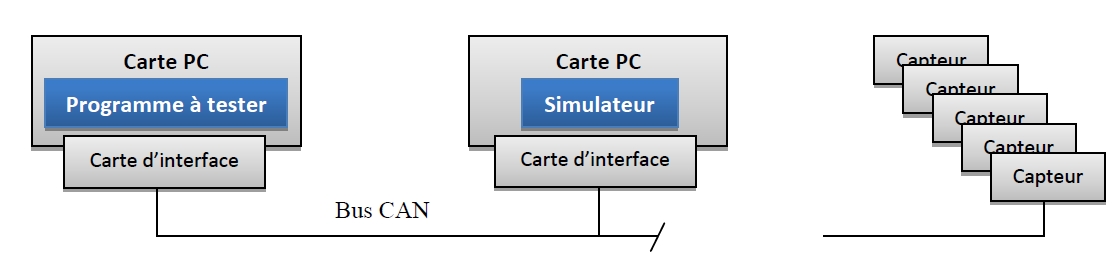
Avant d'entamer la dernière étape du projet, les réalisations précédentes ont été validées par l'entreprise, c'est-à-dire le portage de l'application sur la nouvelle carte PC, le paramétrage dynamique de celle-ci et le simulateur. Enfin, le projet s'est terminé par le remplacement complet de l'interface de communication sur le bus, remplacement qui a pu être validé grâce au simulateur réalisé auparavant.
Résultats obtenus
L'entreprise dispose désormais d'une application paramétrée dynamiquement fonctionnant sur la nouvelle carte PC et communiquant avec une nouvelle interface CAN. De plus, elle possède un simulateur communiquant sur le bus CAN. Cette nouvelle solution sera mise en oeuvre sur les chantiers classiques de Robodrill et sera également utilisée afin d'étendre le secteur d'activité de Robodrill au marché de la mine.
Pour plus d'information, projet.industriel@esisar.grenoble-inp.fr
 retour
retourContact
Gabriel Blanchard
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47