Mots-clé
Machine de forage, Accéléromètre, Gyroscope, Microcontrôleur, Wireless
Millésime
2013-2014
Entreprise
R2S Robotics
Equipe projet
CHARRON Lucas
DUCROS Maxime
TUGNOLI Julien
DUCROS Maxime
TUGNOLI Julien
Contexte du projet
 R2S Robotics a été créée en septembre 2012 par M. Chanclou. Cette société est spécialisée dans l’électronique des systèmes adaptés au milieu minier, en proposant des services de reporting et de commande. L’objectif du projet industriel est de réaliser un module de capteurs permettant de mesurer beaucoup de paramètres tels que les inclinaisons ou les vitesses angulaires. Les mesures effectuées permettront de positionner précisément le bras robotique dans l’espace, et même de positionner la machine dans la mine (sans GPS). Le système pourra ensuite par la suite être utilisé afin d’automatiser les machines.
R2S Robotics a été créée en septembre 2012 par M. Chanclou. Cette société est spécialisée dans l’électronique des systèmes adaptés au milieu minier, en proposant des services de reporting et de commande. L’objectif du projet industriel est de réaliser un module de capteurs permettant de mesurer beaucoup de paramètres tels que les inclinaisons ou les vitesses angulaires. Les mesures effectuées permettront de positionner précisément le bras robotique dans l’espace, et même de positionner la machine dans la mine (sans GPS). Le système pourra ensuite par la suite être utilisé afin d’automatiser les machines.Méthodes et développements
Choix des composants
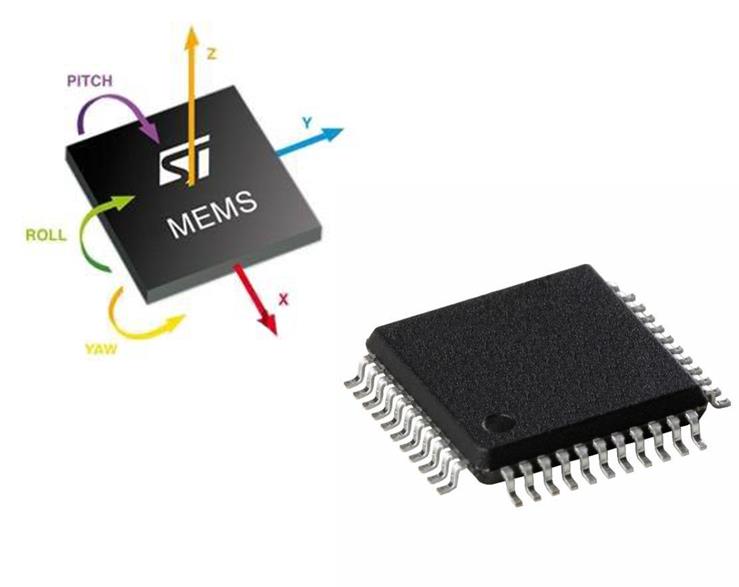
Recherche des meilleurs composants en rapport qualité/prix, choix d’un capteur et d’un microcontrôleur adapté au besoin.
Conception du module
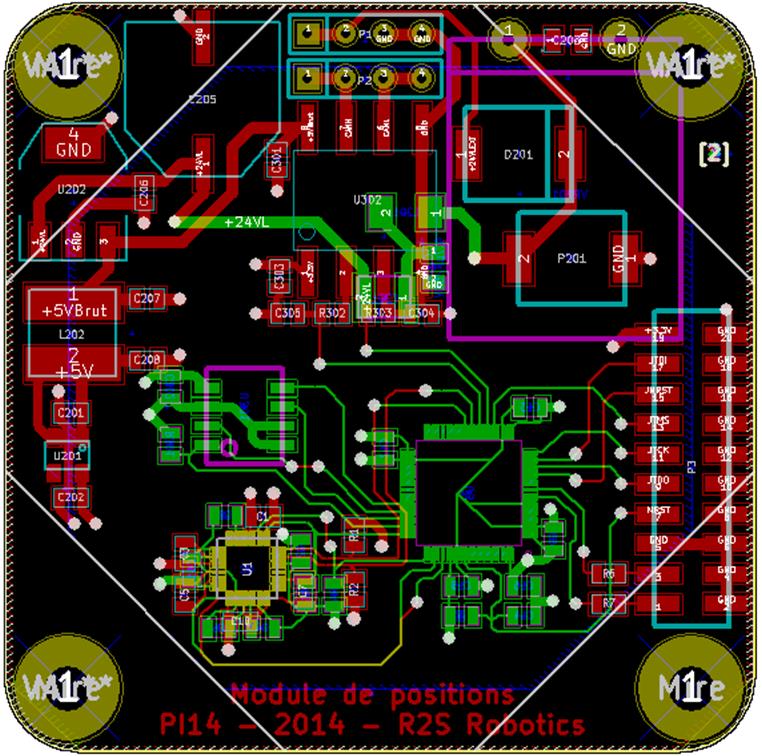
La carte est d’abord réalisée sur Kicad à l’aide de documents nous aidant dans le choix des composants.
Développement logiciel

Traitement des données:
- Préfiltrage des mesures
- Fusion des capteurs accéléromètre et gyroscope avec filtre de Kalman
- Fusion des capteurs accéléromètre et gyroscope avec filtre de Kalman
Résultats et conclusion
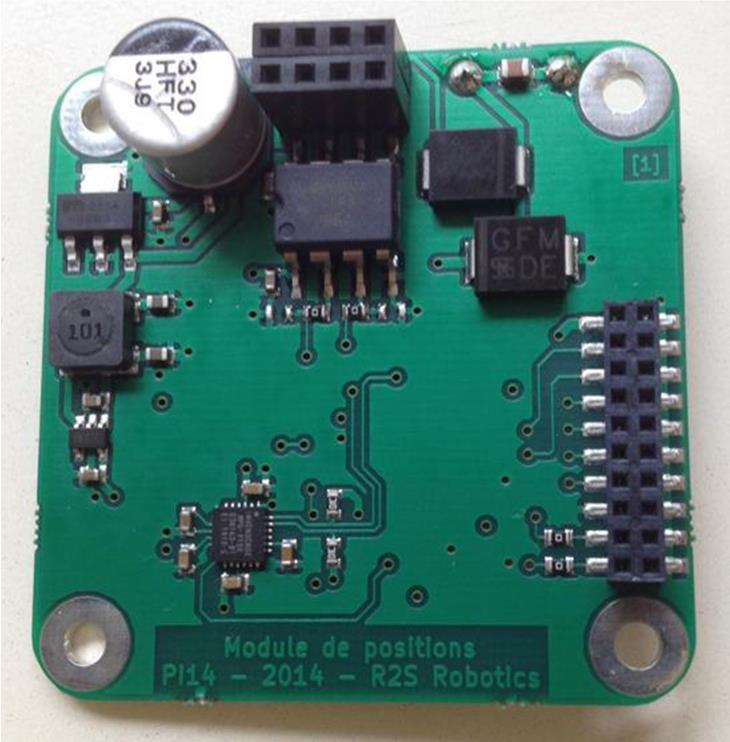 Nous avons conçu un module de capteurs avec alimentation filaire ou sur batterie et transmission pas bus CAN ou Bluetooth, au choix de l’utilisateur. Il s’intègre parfaitement au boitier usiné par R2S ROBOTICS, il est destiné à être fixé sur le bras de forage. Notre système de capteurs mesure les angles de tangage, lacet et roulis du bras de forage. Il fonctionne en statique, comme un inclinomètre, avec une précision inférieure au degré. Ce module de capteurs fonctionne également en dynamique, ainsi R2S Robotics pourra développer dans un projet futur un asservissement du bras de forage.
Nous avons conçu un module de capteurs avec alimentation filaire ou sur batterie et transmission pas bus CAN ou Bluetooth, au choix de l’utilisateur. Il s’intègre parfaitement au boitier usiné par R2S ROBOTICS, il est destiné à être fixé sur le bras de forage. Notre système de capteurs mesure les angles de tangage, lacet et roulis du bras de forage. Il fonctionne en statique, comme un inclinomètre, avec une précision inférieure au degré. Ce module de capteurs fonctionne également en dynamique, ainsi R2S Robotics pourra développer dans un projet futur un asservissement du bras de forage. De nombreux tests ont été réalisés sur un bras industriel de haute précision afin de pouvoir estimer les paramètres du filtre de Kalman et valider le fonctionnement de notre module. Finalement, la précision demandée est obtenue sur les angles de tangage et de roulis. Les mesures de l’accéléromètre ne donnent aucune information sur l’angle de lacet, il n’a donc pas été possible d’obtenir la précision demandée pour cet angle.
De nombreux tests ont été réalisés sur un bras industriel de haute précision afin de pouvoir estimer les paramètres du filtre de Kalman et valider le fonctionnement de notre module. Finalement, la précision demandée est obtenue sur les angles de tangage et de roulis. Les mesures de l’accéléromètre ne donnent aucune information sur l’angle de lacet, il n’a donc pas été possible d’obtenir la précision demandée pour cet angle.Pour plus d'information, projet.industriel@esisar.grenoble-inp.fr
Contact
Gabriel Blanchard
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47