
Mots-clé
GPS, inversion de matrice, carte d’évaluation, systèmes embarqués, partitionnement logiciel/matériel, traitement du signal.
Millésime
2013-2014
Entreprise
THALES AVIONICS
Equipe projet
CHALENDARD Jocelyn
LE GAL Thomas
NAULLEAU Clémentine
LE GAL Thomas
NAULLEAU Clémentine
Contexte du projet
 THALES Avionics est une filiale du groupe THALES, et fait partie de la division aéronautique du groupe. Ce projet travaille notamment sur les systèmes de géolocalisation.
THALES Avionics est une filiale du groupe THALES, et fait partie de la division aéronautique du groupe. Ce projet travaille notamment sur les systèmes de géolocalisation.Les satellites GPS émettent des signaux qui sont reçus par chacun des utilisateurs. Ces signaux peuvent être bruités et devront être traités pour obtenir le signal utile. Ces traitements demandent notamment des inversions de matrice.
Le projet aura trois principaux objectifs :
- comparer et choisir des cartes d’évaluation du marché
- inverser des matrices
- faire un choix optimum de partitionnement logiciel/matériel sous des contraintes de systèmes embarqués
Méthodes et développements
Veille technologique
- Etat de l’art sur les cartes d’évaluation du marché
- Recherche et comparaison des différents algorithmes d’inversion de matrices
Cahier de spécifications
- Définition de chaque fonctionnalité
- Définition des contraintes à prendre en compte :
- consommation énergétique
- vitesse de calcul
- ressources utilisées (type et nombre d’opérations, etc.)
- Application utilisant l’inversion de matrices, permettant de visualiser les différences de rapidité des différents algorithmes
Développement
- Etude sur le partitionnement :
- quelle partie des calculs sera faite dans la partie logique (matérielle) ?
- Codage des algorithmes d’inversion de matrices :
- en langage C uniquement (uniquement logiciel, sans partitionnement),
- codage partitionné des algorithmes : en langage C (partie logicielle) et en VHDL (partie matérielle).
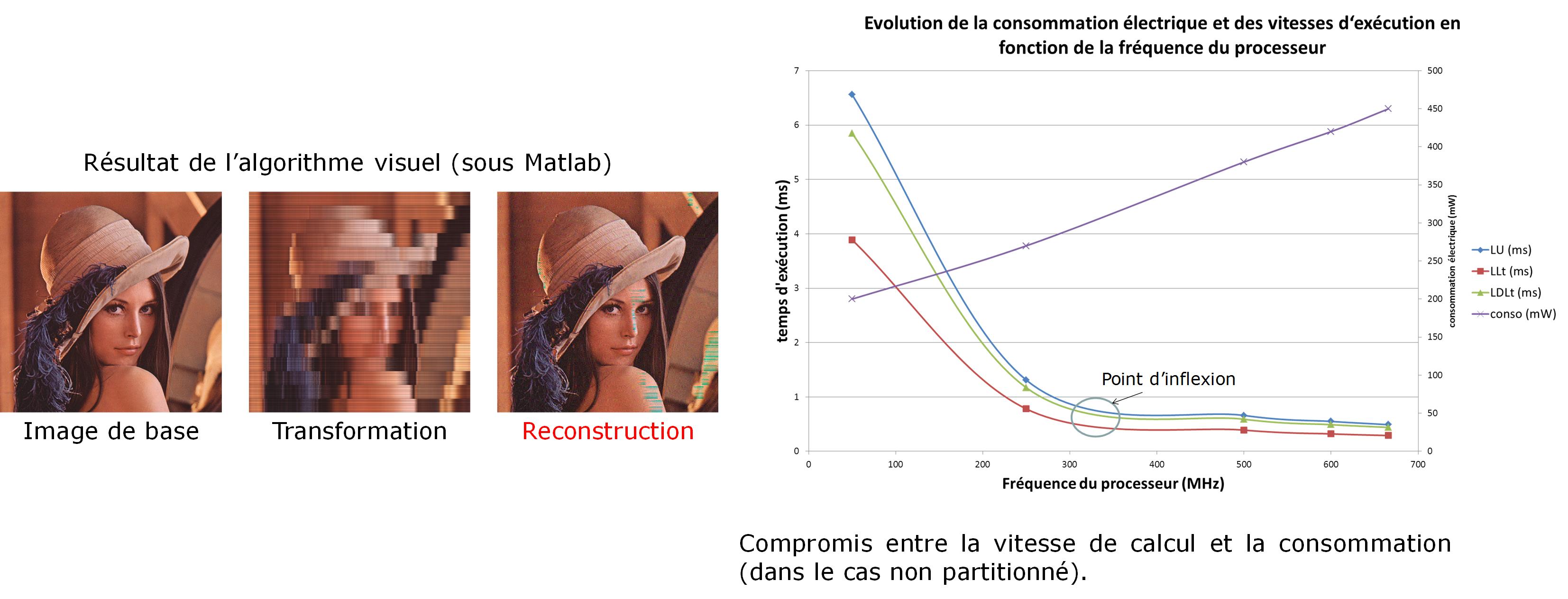
- Codage de l’application visuelle :
- découpage de l’image en blocs de pixels (chaque bloc étant une matrice)
- création d’une matrice de passage (ayant les propriétés définies dans le cahier des charge) et multiplication de chaque bloc de pixel par cette matrice
- inversion de la matrice de passage
- Reconstruction de chaque bloc de pixels (en les multipliant par l’inverse de la matrice de passage)
Résultats et conclusion
Une IHM permet de choisir l’algorithme d’inversion et le partitionnement (purement logiciel ou logiciel et matériel). Elle renvoie la matrice créée (à inverser), son inverse, ainsi que le temps d’exécution de l’algorithme.
Pour plus d'information, projet.industriel@esisar.grenoble-inp.fr
Contact
Gabriel Blanchard
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47
Directeur transfert de technologies
Tel : +33 4 75 75 94 11
Stéphanie Ruard
Assistante transfert de technologies
Tel : +33 4 75 75 94 47