Informations générales
Number of hours
- Lectures 9.0
- Projects -
- Tutorials 9.0
- Internship -
- Laboratory works 9.0
- Written tests -
ECTSECTS
1.5
Goal(s)
Give the main properties of linear dynamical systems with discrete time. Give the fundamentals of digital control of linear systems. Present different methods of synthesis of discrete-time controllers. Give an methodology for the implementation of discrete-time controllers on real-time calculators with the account of the aspects related to finite precision representation of numbers. At the end of the course, students should be able to implement digital control of dynamic system with desired specifications.
Responsible(s)
Ionela PRODAN
Content(s)
1) Computer Controlled Systems
- General structure
- Sampling, discrete signals, Selection of sample period
2) Representation by transfer function of discrete-time linear systems
- The z transform and its properties
- Methods for calculating the approximate z transform
- Stability of discrete time systems
- Discrete time modelling of systems driven by computer
- Implementation of a discrete time transfer function on a calculator
3) Controllers synthesis
- Control Structures
- Analysis feedback controlled systems and specifications
- Saturation of integration term of controllers
- Direct experimental determination of parameters of PID controllers
- Controller synthesis by dominant pôles compensation
- Controller synthesis by Open Loop Shaping using PID and phase lead controllers
- Controller synthesis by closed-loop pôle placement - RST Structure
Practical work:
Use of computer-assisted synthesis and simulation softwares
Experimental implementation of the designed control laws on rapid prototyping system.
Linear algebra, complex numbers, Laplace Transforms,
Bode, Nyquist and Nichols Diagrams
Prerequisites desirable: analysis and control of continuous time systems
Test
N1 = 0.5*E1 + 0.3*TP + 0.2*TD
N2 = 0.7*E2 + 0.3*TP
Nconf= 100% E1
Session 1 :
E1 = Final exam , written 1h30, Allowed : 1 handwritten A4 recto-verso paper, simple calculator.
TP = average scores in practical works (notes reflect the results obtained during the sessions and reports).
Session 2 :
E2 = 1h30 written exam, Allowed : 1 handwritten A4 recto-verso paper, simple calculator.
Calendar
The course exists in the following branches:
- Curriculum - EIS (Apprenticeship) - Semester 7 - App
Additional Information
Course ID : 4AMAC427
Course language(s): 
The course is attached to the following structures:
You can find this course among all other courses.
Bibliography
H. Bülher, Réglages échantillonnés, Vol. 1 et 2, 1982, Presses Polytechniques Romandes
I.D. Landau, Identification et commande des systèmes, 1988, Hermès
P. De Larminat, Automatique : Commande des systèmes linéaires, 1994, Masson
P. De Larminat, Des régulateurs PID à la commande LQG-LTR : une approche robuste par placements de pôles, Chap. 3 du livre Conception de commandes robustes, 2002, Hermès
P. Vanheege, C. Sueur, P. Borne, Automatique des systèmes échantillonnés, 2001, Technip
K.J. Aström, B. Wittenmark, Computer-Controlled Systems, 1997, Prentice Hall
French State controlled diploma conferring a Master's degree
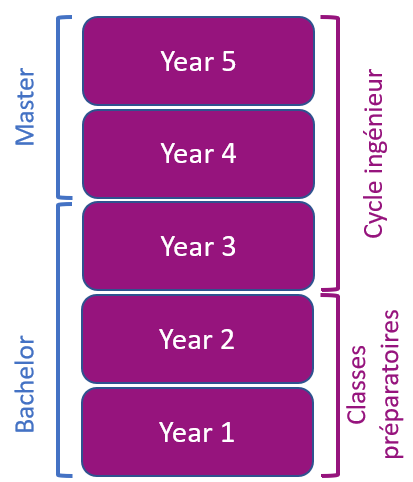
What is a grande école ?

French engineering curriculum